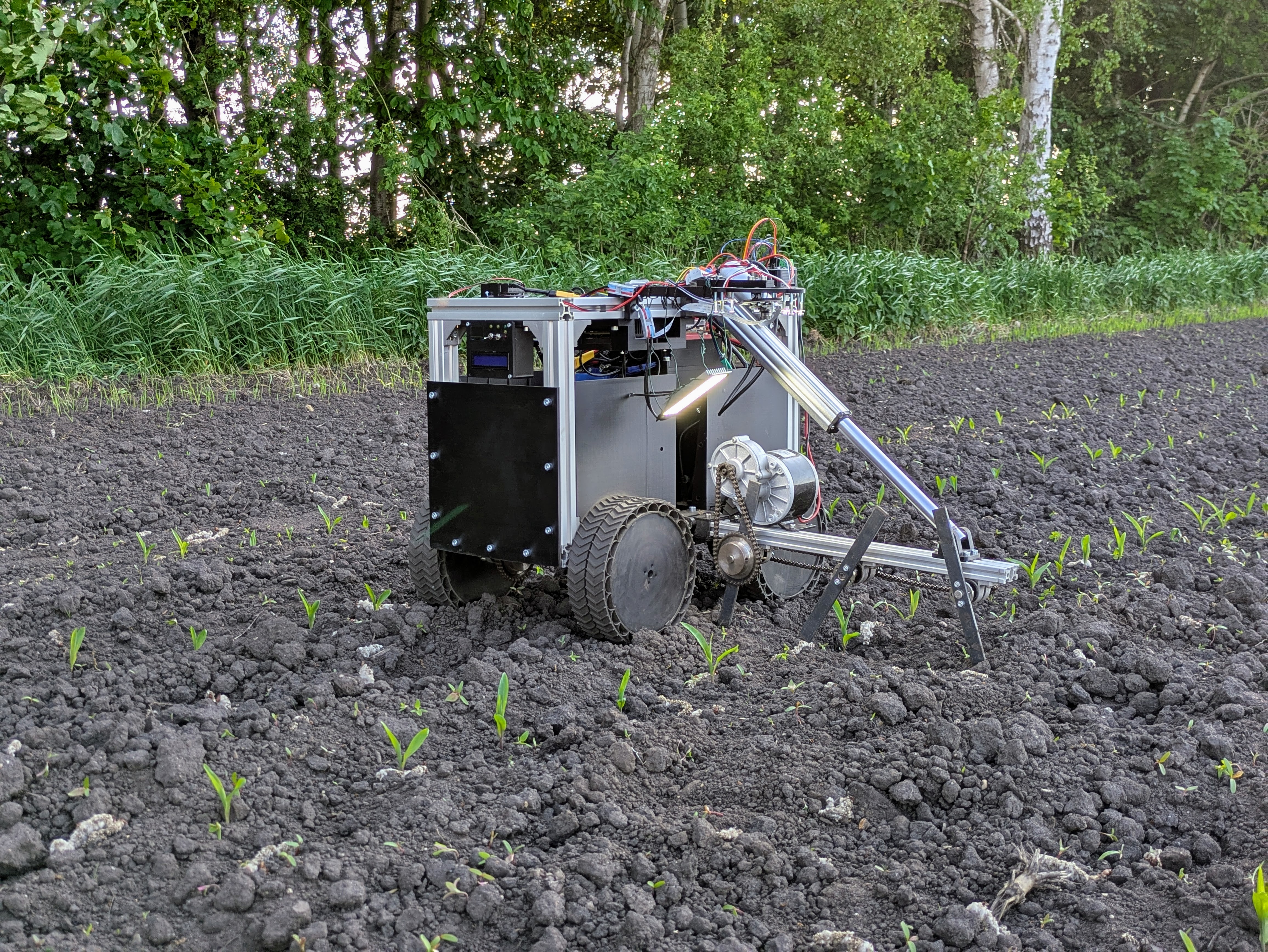
About WeedXtract
WeedXtract is a personal project focused on developing cost efective solutions for autonomous precision weeding robots. The goal is to test, validate, and refine new concepts that improve the efficiency and accuracy of preccision weeding robots in agriculture by builing a robot prototype using them.